
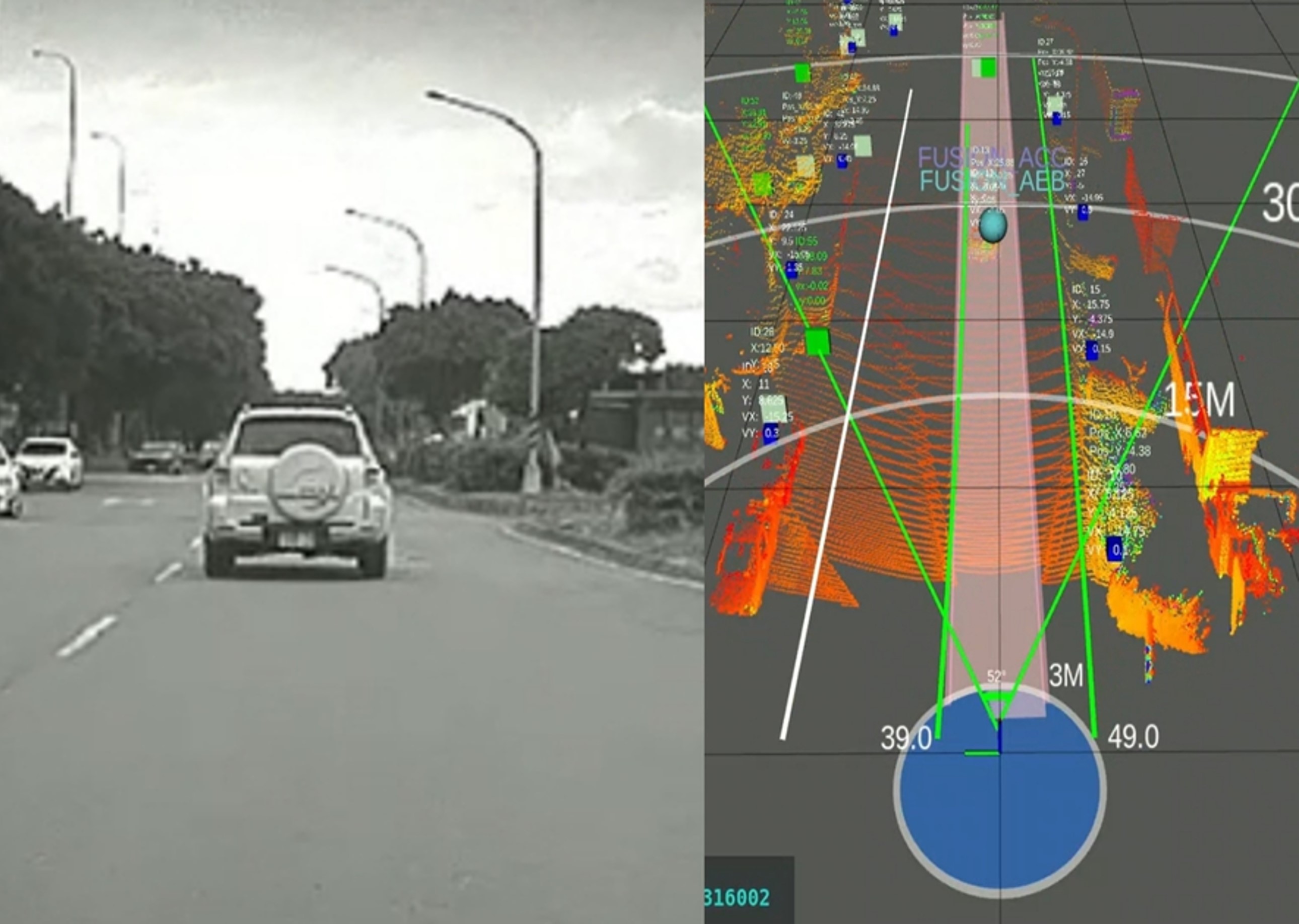
ACC(Adaptive Cruise Control)
自適應巡航控制功能,並導入深度學習以取得最佳化的控制效果,並得以依據外在環境變化更即時進行車輛動態調整,達到更加舒適安全的駕駛體驗。

我們的實驗室專注於先進駕駛輔助系統(ADAS)的研發,致力推動自動駕駛技術的進步。實驗室與業界緊密合作,承擔多項計畫,涵蓋車用感知融合、自駕車決策與控制、自主移動機器人(AMR)及影像辨識等領域。我們聚焦於前瞻技術的開發,並積累了豐富的實戰經驗,為提升自動駕駛的安全性和運輸效率,減少交通風險不斷努力。
自適應巡航控制功能,並導入深度學習以取得最佳化的控制效果,並得以依據外在環境變化更即時進行車輛動態調整,達到更加舒適安全的駕駛體驗。

是一種先進駕駛輔助系統,能在偵測到碰撞風險時自動啟動煞車,以減少碰撞或降低事故嚴重性。它通過雷達、攝像頭等傳感器持續監測車輛周圍環境,並在駕駛者未能及時反應時自動介入。
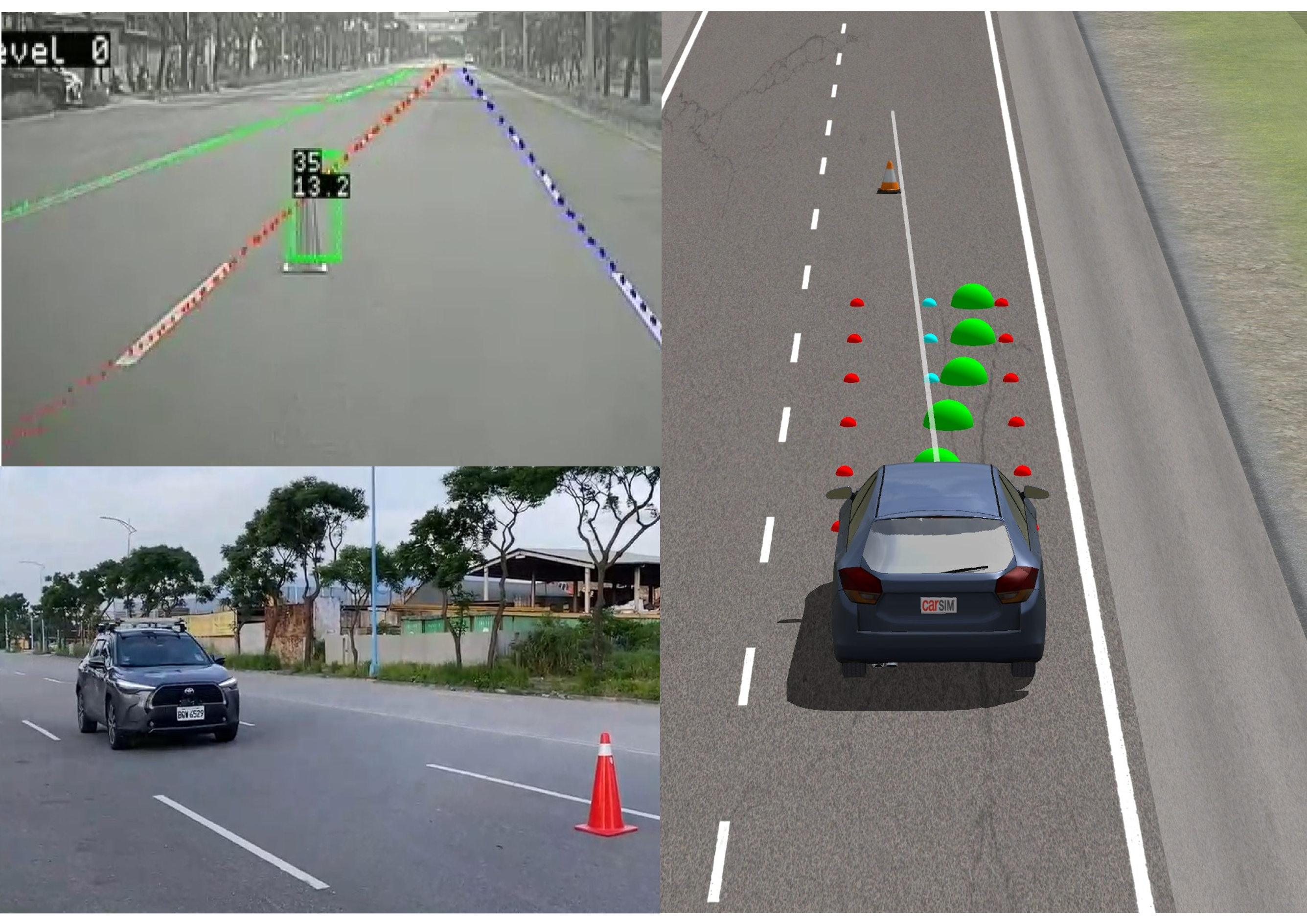
透過感知器偵測前方物件和車道線,利用車道中心與障礙物的距離、車速進行危險性評估,並以位能圖呈現危險性。透過位能圖的梯度高度與方向進行路徑規劃,確保避開障礙物時不壓車道線,且在無法避免碰撞時保持在車道內。

內輪差盲區警示系統,能偵測大型車轉彎時內輪差的盲區範圍,若偵測到與障礙物、行人且存在碰撞風險,系統立即發出警示或進行制動,保障行車安全
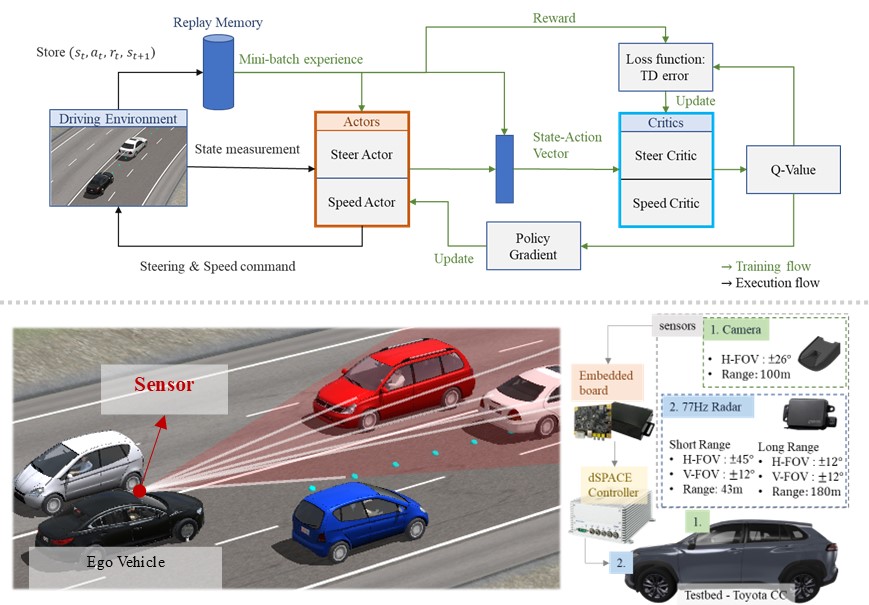
利用深度強化學習(DRL)開發自適應巡航控制(ACC)與車道保持輔助(LKA),採用雙Actor架構協同控制車速與轉向。透過模擬訓練,學習在複雜交通中靈活調整車速與方向,提升系統穩定性與適應性。
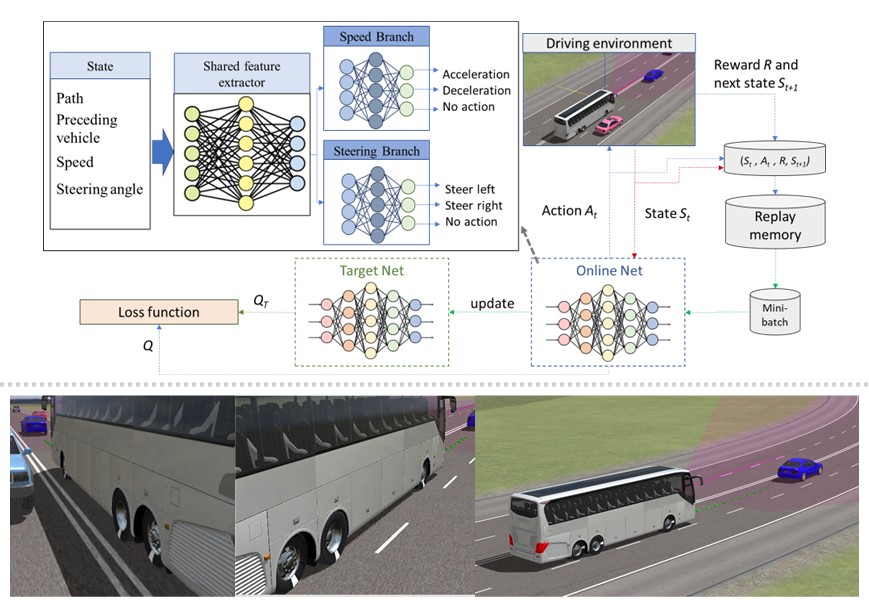
本研究針對公車轉向與速度控制,採用深度強化學習(DRL)並設計two-branch架構,分別輸出速度與轉向控制。不僅能分類駕駛模式,還可輸出連續控制量,提升行車平順性與安全性,適用於智慧駕駛輔助與自動駕駛公車應用。
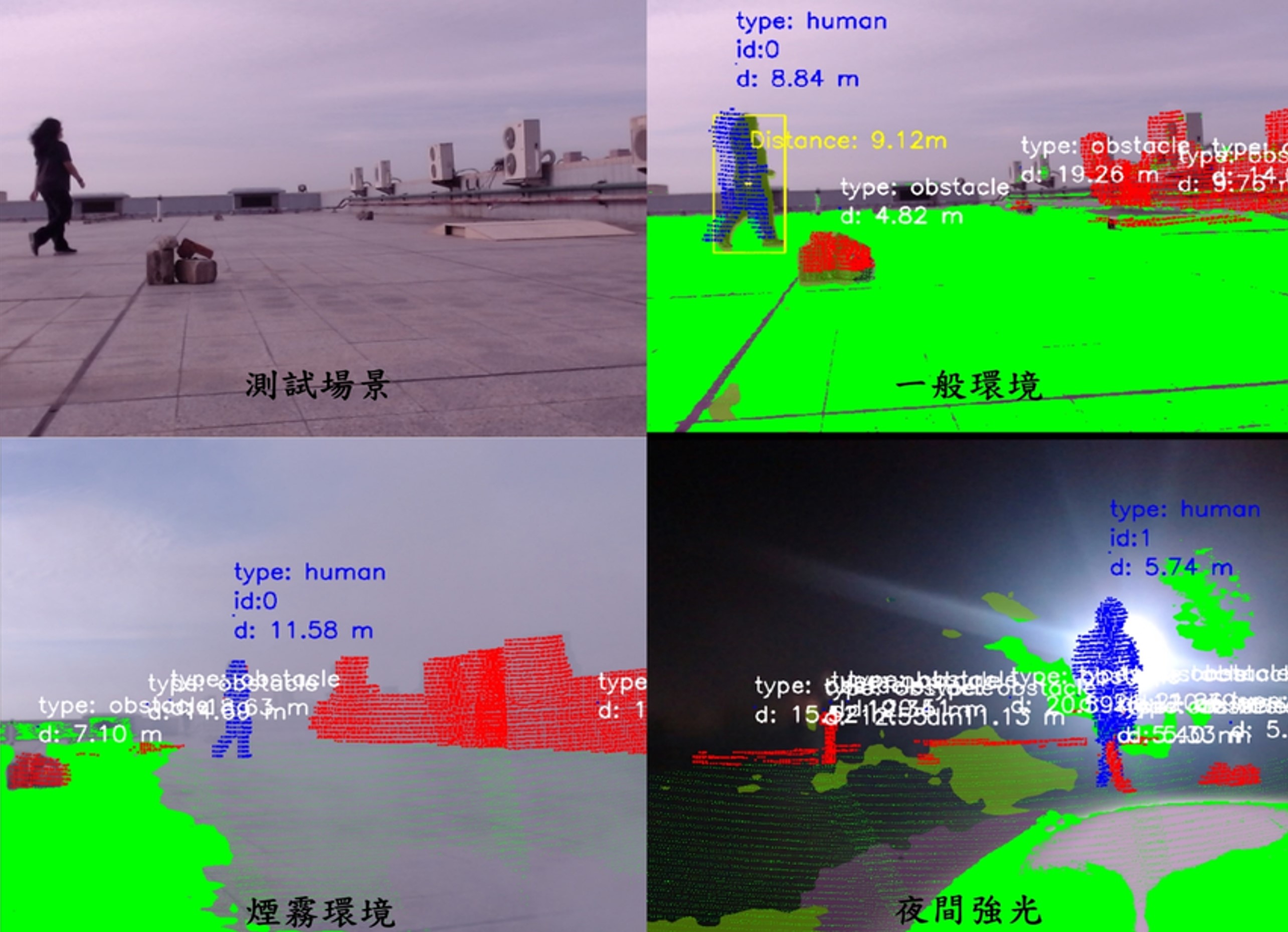
藉由時間同步、空間對齊、特徵提取、匹配策略及融合算法等步驟,將LiDAR(點雲)、Camera(影像資訊)等感測器資訊進行感知融合,以利於多種惡劣環境下相互映證,提升算法強健性。
利用LiDAR與里程計的定位軌跡進行兩階段自動校準,使用ICP演算法校正LiDAR位置,接著比對LiDAR與里程計的軌跡進行里程計校正,實現全自動校準,確保高精度定位與操作效率。
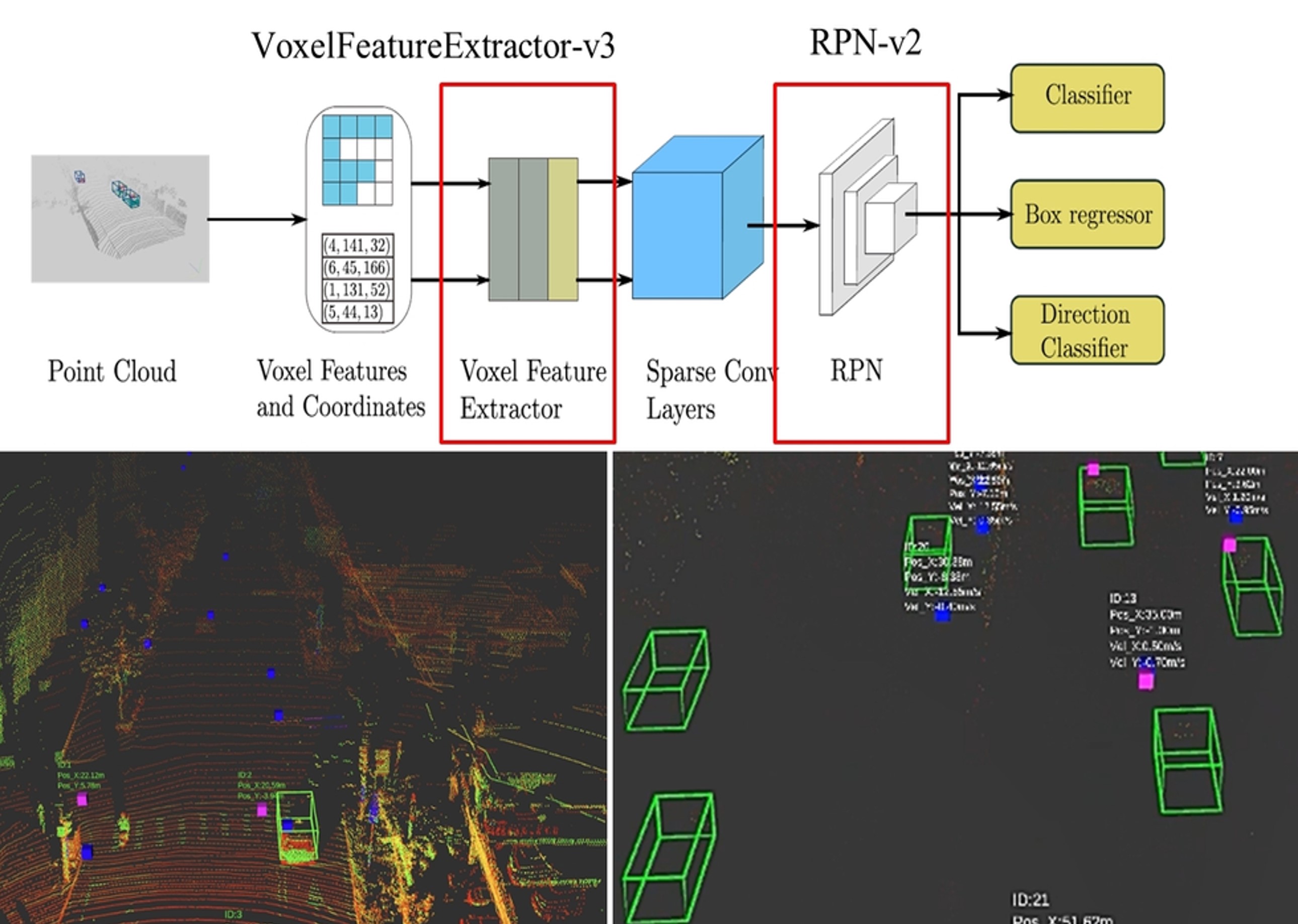
透過特徵提取與卷積層處理,從原始 LiDAR 點雲中自動生成候選框,並透過區域候選網路(RPN),可以精準識別和標註車輛、行人、自行車等多種目標物。
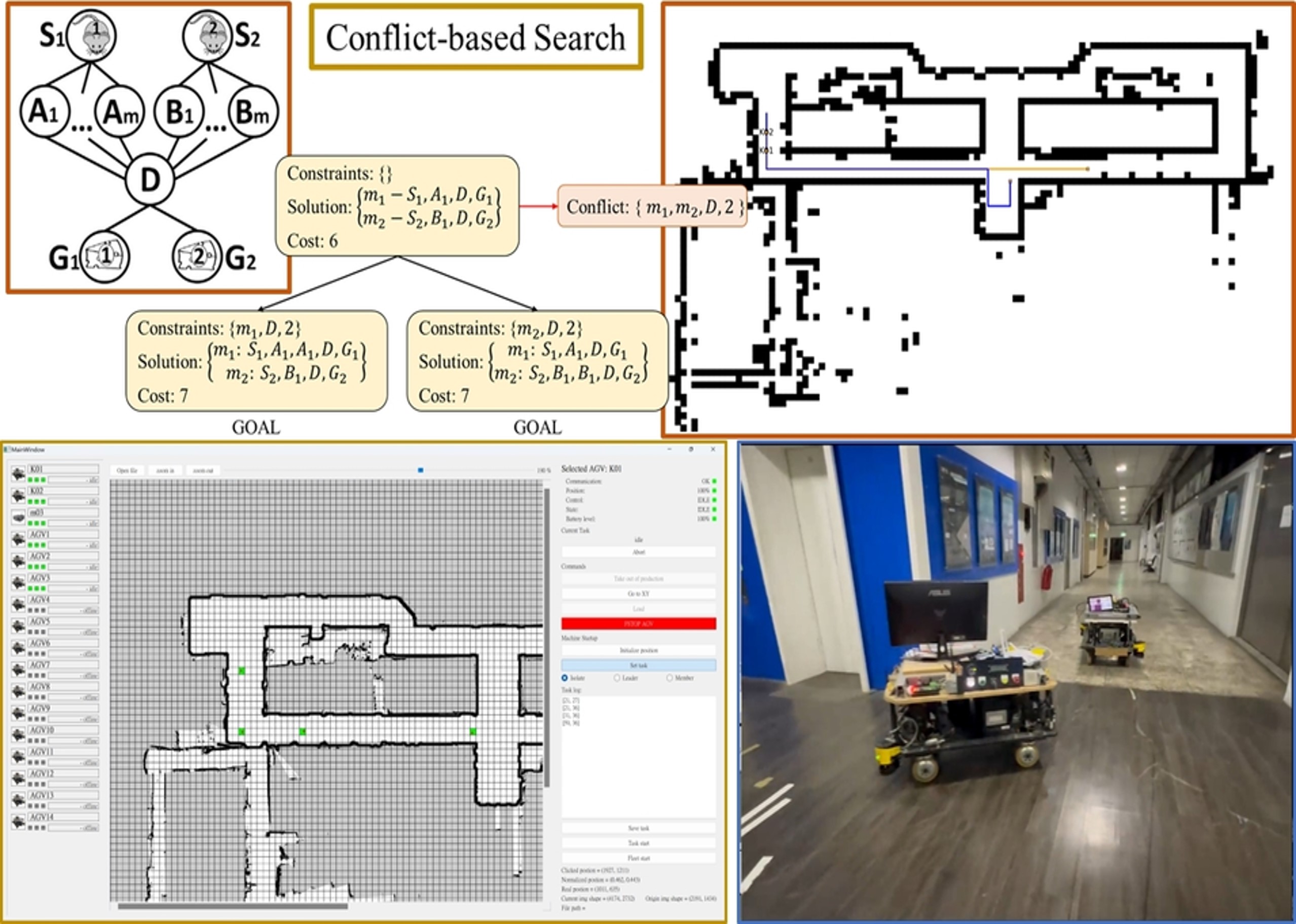
AMR車隊管理系統具備多重功能,能為多台AMR智能規劃最佳路徑,協同組成列隊行進,並進行即時監控,確保車隊運行的效率與安全性。
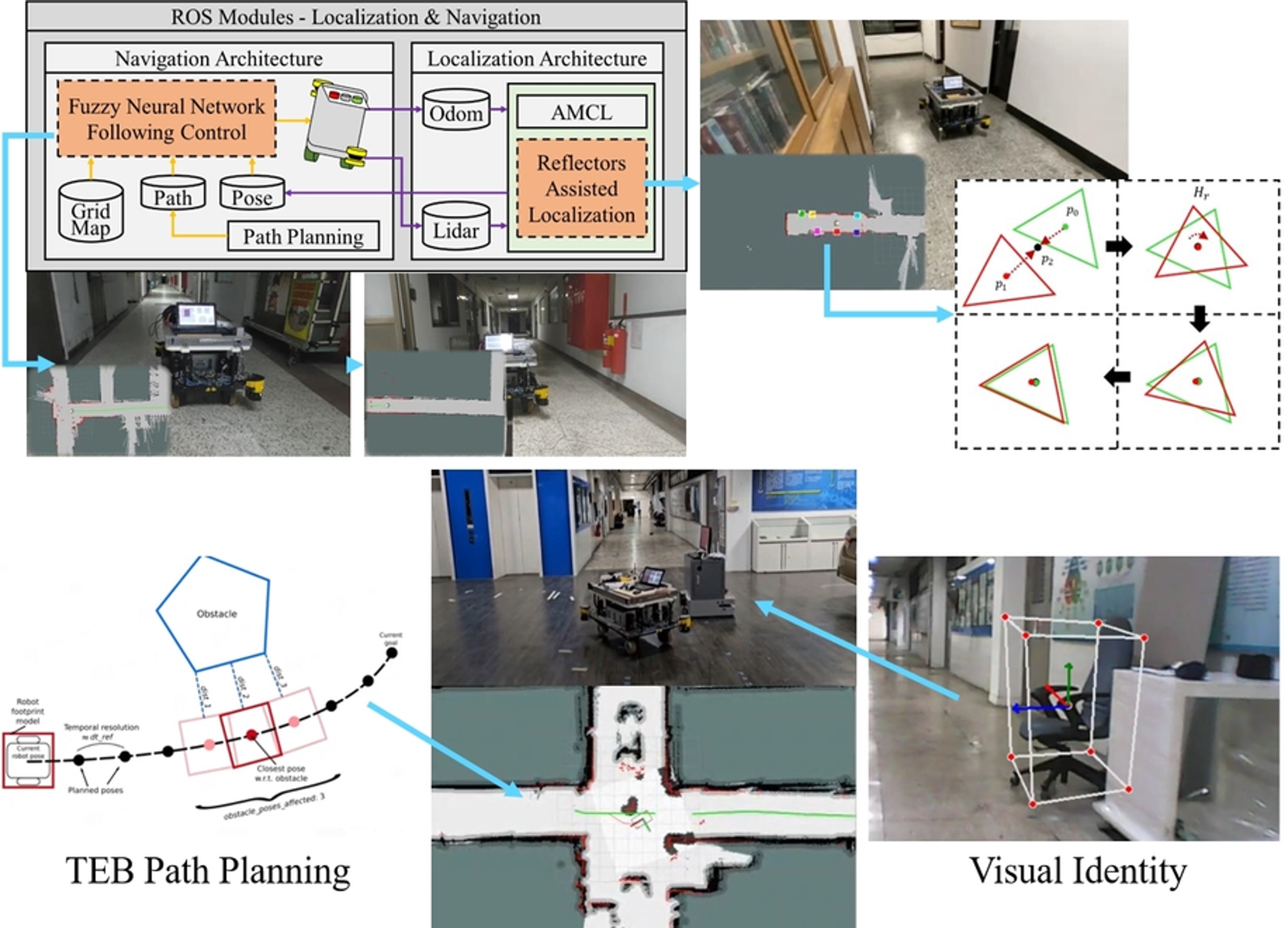
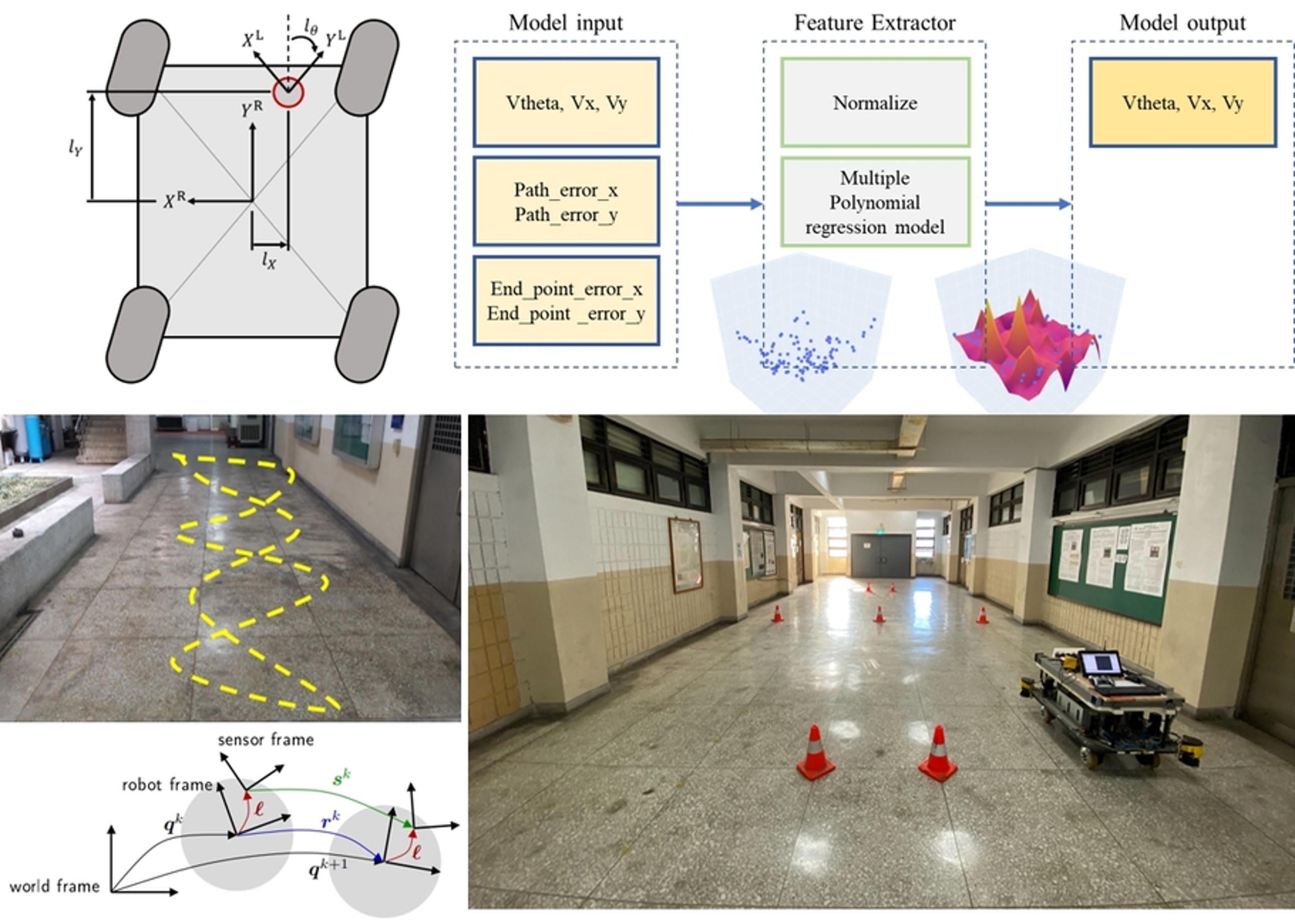
高精度的定位與導航技術,使用相機與LiDAR進行環境與物件偵測,並能夠透過路徑規劃技術智能地避開障礙物,確保安全與高效的運行。